Industrial robots that can perform simple tasks 24 hours a day instead of humans
In fact, the term “robot” is not clearly defined, but is commonly used as a general term for machines with various operating functions. Among these machines, it is industrial robots that perform tasks on production lines in manufacturing plants. These robots are automated machines that performs tasks instead of humans, and their movements are controlled by programs.
Unlike machine tools which are designed to perform only certain tasks repeatedly, industrial robots can be programmed to perform various tasks, and the programs can be modified. Machine tools perform high-precision machining for a single purpose, while industrial robots are used to automate multiple tasks.
The biggest advantage of industrial robots is that they can replace humans in practical work. Not only can they replace humans in performing tasks that used to take time and energy, but such robots can also work 24 hours a day. They are good at simple repetitive tasks that are painful for humans, too.
For example, in the case of an automobile factory line, human workers used to tighten bolts and install panels endlessly. Even with machine tools, when machining one part and then machining it again on a different machine, humans had to carry the part and operate several machine tools for the machining. With industrial robots, however, what is needed is only one human being who monitors the work done by multiple robots, reducing the number of workers. Now, industrial robots are being introduced even outside of large-scale factories.
One reason why more industrial robots are introduced is the decline in introduction costs. In addition, humans are nominally allowed to work only eight hours a day, but robots can operate 24 hours a day. That is, even if robots work three times slower than humans, the daily production will be equal, and if robots work even slightly faster than that, the same amount can be produced faster. It used to be said that it would be cheaper to hire humans than robots, but now initial costs of introducing robots can be recovered faster than before, and robots are becoming more cost-effective.
Another major reason, it seems, is that people have come to feel comfortable working remotely now in the wake of the COVID-19 pandemic. Also, just as with the shift from conventional mobile phones to smartphones, once industrial robots are put to use, people realize how convenient these robots are, which may have led to the spread of the robots accelerating.
The more robots are introduced, the more costs can naturally be spent on development and the better the performance of the robots. In addition to robots’ smoother movements, advances in motors for robots have also lowered the barrier to introducing them. The motors have become more compact, and even a small motor can produce a lot of power.
Yet another big reason is that robot teaching, which means teaching robots how to function, has become easier. Teaching robots used to require highly specialized knowledge, but now you can set up a lot of robots with a little learning. Some companies provide support for setting up robots, offering an increasing number of services that make it easier to introduce robots, such as coordinating which robots and how they can be used in factories in need of them.
Robotic arms with a high degree of freedom like a human arm take on 4D jobs
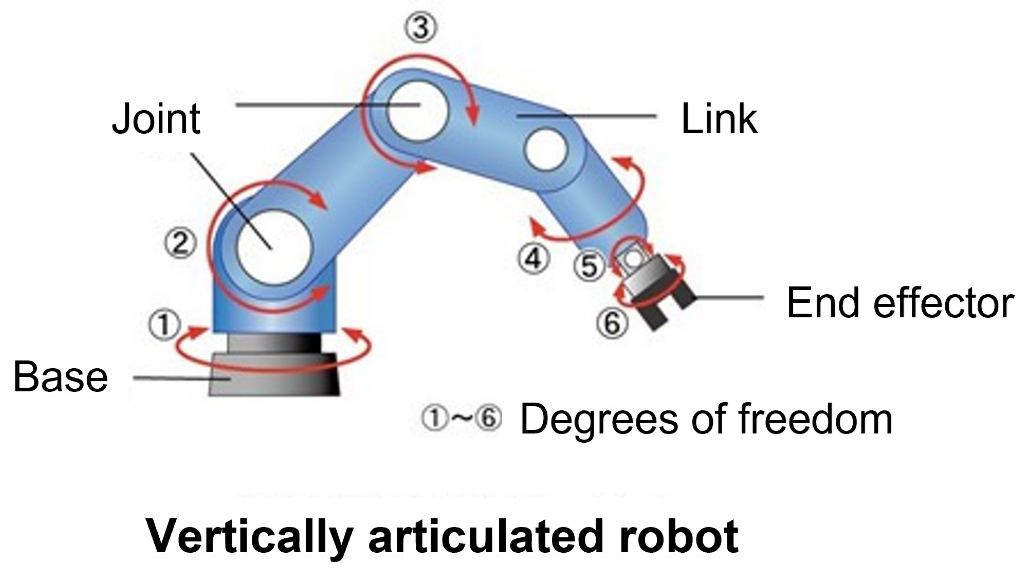
Industrial robots come in a variety of types. Examples include SCARA robots (horizontal multi-joint robots), whose arms move horizontally, or parallel link robots (high-speed multi-joint robots), whose parallel-connected links (axes) move at high speed in unison. Each robot plays an active role, making the most of its own unique characteristics. Among these, robot arms (vertically multi-joint robots) are attracting the most attention. One feature of robot arms is that, unlike robots that can only move in linear or circular motion, they can move freely like a human arm and can reenact almost everything humans can do.
The most common type of robot arm is that with the 6-axis mechanism. It uses six axes to realize six degrees of freedom, encompassing both linear movements along X, Y, and Z axes and rotational movements around those same axes. In contrast, as you can see by moving your arm, the shoulder joint of a human has a range of motion in three axes, the elbow joint in one axis, and the wrist joint in three axes. Achieving the same range of motion needs seven axes, but six axes are sufficient to perform the movement required for work in a three-dimensional space. With their high versatility, robot arms have been introduced into a wide range of processes such as conveying, welding, painting, and assembly.
Another big feature of robot arms is their wide working area. While machining with a machine tool has only been able to process parts that fit inside the machine tool, a robot arm has the advantage of being able to handle larger parts by extending its arm. Also, when moving objects, a crane that moves along the X-axis requires longer rails than the distance it needs to move, but a robot arm can be moved simply by extending its arm, so it takes up less space.
For example, when a human worker keeps tightening many bolts by hand endlessly, it puts a strain on the body, and the repetitive monotonous work can lead to fatigue and careless mistakes. With robots, however, you don’t have to worry about that. In the past, robots were not good at the precision work that skilled craftsmen do, but now, their performance is improving rapidly, and they can move faster and more accurately.
One more important feature is that robots can operate even in bad, hot, or cold weather as long as they are not damaged. For humans, breathing air in cutting and painting environments can be harmful, and some materials are dangerous to touch. Robots can do these 4D jobs, which are very hard for humans, without any problems. They are being further advanced so that they can perform with precision even in conditions that are harsh for humans.
Simplifying robot teaching for further popularity
Although robotic arms have been used for some time, the difficulty of teaching them has been a barrier to their introduction. It is quite difficult to set up and move six-axis joints even for tasks that are easy for humans. Robot teaching involves moving a robot arm little by little and repeatedly, and saving the right position to make it learn its movements, a process that previously required skilled technique.
Recently, however, programs that serve as teaching interfaces have become more user-friendly. Formerly, even in companies that introduced robots, only certain experts were able to understand those programs, but now, the programs have been simplified enough for even new employees who have studied them for a while to understand.
I have been doing research on teaching robot arms. My goal in the future is to eliminate robot teaching itself, but for the time being, I would like to lower the hurdle of introducing robots by reducing the teaching process as much as possible.
Robotic arms present another barrier, and it is “repeatability.” Repeatability roughly refers to the degree of deviation that occurs when a robot’s movements are repeatedly measured under the same conditions.
Machining with machine tools can keep the deviation to only a few μm (micrometers). However, it is not unusual for a robot arm to deviate at the 100 μm level. Robot arms have a high degree of freedom, which requires all the more precise control. Since 100 μm equals 0.1 mm, it does not seem to be much of an error, but for precision machines it is unacceptable. I am also conducting research to reduce deviations so that high-precision parts can be mass-produced.
No matter how widespread remote work is, people working on factory lines cannot work from home. With the introduction of robots that can be managed remotely, it is not impossible to eliminate time and location restrictions, such as allowing people with mobility issues to work. As industrial robots replace human manual labor further and they become more widely used, humans will be able to devote their efforts to other tasks. When industrial robots do tasks that previously required humans to go to the site owing to technical problems, we will be able to create a society where people can spend more time on things they want to do.
* The information contained herein is current as of March 2025.
* The contents of articles on Meiji.net are based on the personal ideas and opinions of the author and do not indicate the official opinion of Meiji University.
* I work to achieve SDGs related to the educational and research themes that I am currently engaged in.
Information noted in the articles and videos, such as positions and affiliations, are current at the time of production.